La conversación sobre inteligencia artificial suele girar alrededor de modelos cada vez más grandes, GPUs más potentes y centros de datos capaces de procesar enormes cantidades de información. Ese enfoque ha sido fundamental para el avance reciente de la IA.
Pero no toda inteligencia artificial vive en un centro de datos.
Cuando la IA se acerca al sensor, a un robot, a una cámara industrial, a un sistema embebido, a una máquina o a un dispositivo de borde, aparecen restricciones muy diferentes: consumo energético, latencia, tamaño, conectividad, disipación térmica, autonomía, integración con hardware y capacidad de respuesta en tiempo real.
En ese contexto, merece la pena mirar hacia arquitecturas alternativas.
Una de ellas es la computación neuromórfica.
Y una de las plataformas que puede ayudar a explorarla, prototiparla y adaptarla es la FPGA.
No se trata de decir que la computación neuromórfica vaya a sustituir a las GPUs. Tampoco de convertir las FPGA en una solución universal para IA. El punto interesante es otro: cuando diseñamos IA para el borde, quizá necesitamos pensar menos en potencia bruta y más en cómo se representa, procesa y mueve la información.
Qué es la computación neuromórfica
La computación neuromórfica es un enfoque de diseño inspirado en ciertos principios del sistema nervioso biológico. No intenta copiar literalmente el cerebro, pero sí toma ideas como el procesamiento distribuido, la actividad basada en eventos, la eficiencia energética y la comunicación mediante impulsos o señales discretas.
En lugar de procesar información continuamente en ciclos fijos, muchos sistemas neuromórficos trabajan con eventos. Solo procesan cuando ocurre algo relevante.
Esta idea es importante.
En una arquitectura convencional, una cámara, un sensor o un sistema de adquisición puede generar flujos constantes de datos, incluso cuando apenas cambia nada. El sistema procesa muestras, imágenes o señales de forma periódica, aunque gran parte de la información sea redundante.
En una aproximación neuromórfica, el interés se desplaza hacia el cambio. No todo se procesa todo el tiempo. Se presta atención a eventos, variaciones, impulsos o actividad significativa.
Eso puede tener mucho sentido en aplicaciones de borde, donde el consumo, la latencia y la eficiencia son críticos.
Spiking neural networks: redes que no funcionan como las redes neuronales habituales
Uno de los conceptos asociados a la computación neuromórfica son las redes neuronales de impulsos, o spiking neural networks.
Las redes neuronales artificiales más habituales trabajan con valores continuos o discretizados que se propagan por capas. En cambio, las redes de impulsos representan la información mediante eventos temporales: impulsos que ocurren en determinados instantes.
Esto introduce una dimensión temporal muy relevante.
No importa solo qué neurona se activa, sino cuándo se activa.
Este tipo de representación puede ser interesante para señales temporales, sensores de eventos, robótica, visión dinámica, procesamiento auditivo, detección de patrones y sistemas que interactúan con el entorno en tiempo real.
Ahora bien, conviene ser prudentes.
Las redes de impulsos todavía no son una sustitución general de las redes neuronales profundas convencionales. Tienen retos importantes: entrenamiento, herramientas, programación, estandarización, disponibilidad de hardware, integración con flujos industriales y madurez del ecosistema.
Pero como línea de investigación y como enfoque para ciertos casos de edge AI, son muy relevantes.
Por qué esto importa en el borde
El edge AI, o inteligencia artificial en el borde, busca ejecutar procesamiento inteligente cerca de donde se generan los datos: sensores, cámaras, máquinas, robots, dispositivos embebidos o sistemas industriales.
Esto puede reducir latencia, disminuir tráfico de datos, mejorar privacidad, aumentar autonomía y permitir respuestas más rápidas.
Pero llevar IA al borde no es trivial.
Un modelo que funciona bien en un servidor puede ser demasiado pesado para un dispositivo embebido. Una arquitectura que funciona bien con alimentación y refrigeración abundantes puede no ser viable en un sistema compacto. Una solución que depende de conectividad estable puede no servir en una instalación distribuida o con restricciones de red.
Por eso las arquitecturas neuromórficas resultan atractivas: prometen procesamiento eficiente, orientado a eventos y potencialmente adecuado para entornos donde no tiene sentido procesar todo de forma continua.
El objetivo no es tener más potencia por tener más potencia. El objetivo es procesar mejor la información que realmente importa.
El papel de las FPGA
Las FPGA tienen un papel interesante en este escenario porque permiten prototipar arquitecturas digitales específicas.
Una FPGA no es un procesador convencional. Es hardware reconfigurable. Permite implementar lógica, caminos de datos, módulos de comunicación, pipelines, control temporal e interfaces adaptadas a una aplicación concreta.
Esto encaja bien con la exploración neuromórfica por varias razones.
Primero, permite experimentar con arquitecturas no convencionales. Si queremos implementar procesamiento basado en eventos, neuronas de impulsos, codificación temporal o comunicación asíncrona controlada, una FPGA puede ser una plataforma adecuada para prototipos.
Segundo, permite acercar el procesamiento al sensor. En aplicaciones donde los datos proceden de cámaras, sensores industriales, señales temporales o dispositivos embebidos, la FPGA puede integrar adquisición, preprocesamiento y lógica de decisión.
Tercero, permite controlar la latencia. El procesamiento puede diseñarse como una ruta específica, con pipelines y estructuras temporales adaptadas al problema.
Cuarto, permite explorar eficiencia. Si el hardware implementa exactamente la función necesaria, puede reducirse el coste de procesamiento frente a soluciones más generales, aunque esto depende mucho del diseño.
Quinto, permite validar arquitecturas antes de pasar a soluciones más especializadas. En investigación, educación o prototipado industrial, la FPGA puede actuar como plataforma intermedia entre la idea algorítmica y el hardware dedicado.
Sensores de eventos: procesar solo cuando algo cambia
Un ejemplo especialmente relevante es la visión basada en eventos.
Una cámara convencional captura imágenes completas a una frecuencia fija. Aunque una escena apenas cambie, se siguen generando frames completos.
Una cámara de eventos funciona de otra forma: cada píxel informa cuando detecta un cambio significativo. En lugar de enviar imágenes completas constantemente, genera eventos asociados a cambios locales de intensidad.
Este enfoque puede reducir redundancia y permitir respuestas muy rápidas en escenas dinámicas.
Combinado con procesamiento neuromórfico o FPGA, puede abrir posibilidades interesantes para robótica, seguimiento de objetos, inspección rápida, navegación, detección de movimiento o sistemas embebidos de baja latencia.
Pero de nuevo, no hay que exagerar.
No todos los problemas de visión se resuelven mejor con sensores de eventos. No todas las aplicaciones industriales necesitan este enfoque. Y la integración con sistemas existentes puede requerir herramientas, conocimiento y validación específicos.
La pregunta correcta no es “¿es mejor una cámara de eventos?”. La pregunta correcta es: “¿este problema necesita procesar cambios temporales con baja latencia y alta eficiencia?”.
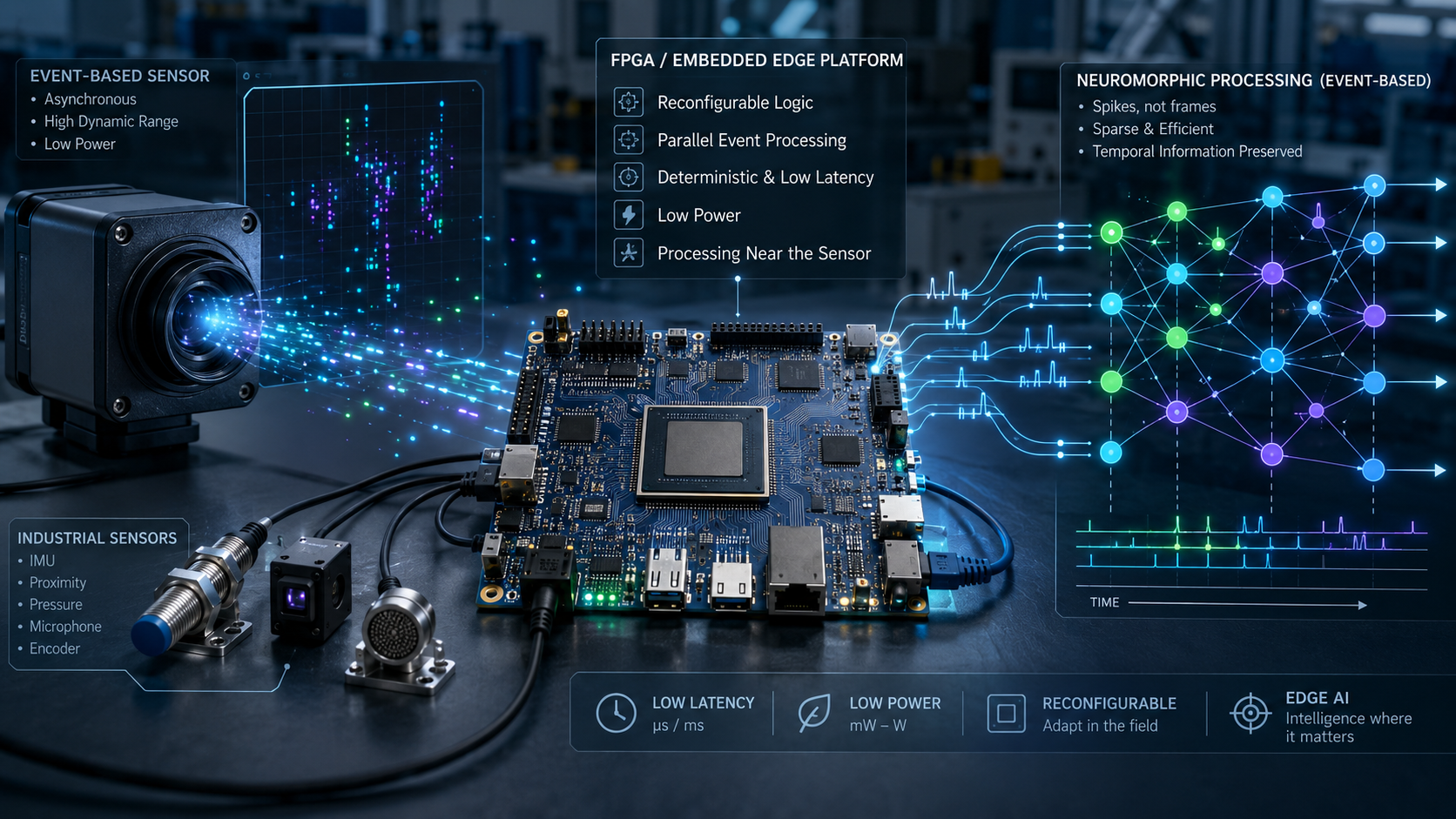
FPGA, neuromórfico y edge AI: una arquitectura posible
Imaginemos una aplicación de borde donde un sistema debe detectar eventos rápidos en una máquina o en una escena industrial.
Una arquitectura convencional podría capturar datos de forma periódica, enviarlos a una CPU o GPU, ejecutar un modelo y generar una respuesta.
Una arquitectura alternativa podría trabajar de forma más orientada a eventos.
El sensor genera información solo cuando ocurre un cambio relevante. La FPGA recibe esos eventos, los filtra, los ordena temporalmente, ejecuta una lógica de detección o una red de impulsos simplificada y comunica una alerta o decisión a un sistema superior.
En este caso, el objetivo no es sustituir todo por IA neuromórfica. El objetivo es reducir latencia, consumo y volumen de datos en una parte concreta del sistema.
La FPGA puede actuar como puente entre el sensor, el procesamiento de eventos y la arquitectura industrial o embebida.
Este tipo de enfoque puede ser interesante cuando el sistema necesita reaccionar rápido, procesar localmente y evitar transferir datos innecesarios.
Dónde puede aportar valor
La combinación de computación neuromórfica y FPGA puede ser especialmente atractiva en ciertos contextos.
Uno es la robótica, donde los sistemas deben reaccionar a cambios del entorno con baja latencia.
Otro es la visión dinámica, donde interesa detectar movimiento, variaciones o eventos rápidos sin procesar imágenes completas continuamente.
También puede ser útil en señales temporales, donde patrones de actividad, impulsos o eventos tienen más importancia que valores estáticos.
En sistemas embebidos de bajo consumo, puede ayudar a reducir procesamiento innecesario.
En educación e investigación, las FPGA permiten experimentar con arquitecturas neuromórficas de forma flexible y controlada.
En edge AI industrial, puede abrir vías para detección rápida, preprocesamiento inteligente o clasificación ligera cerca del sensor.
Pero el valor aparece cuando hay una necesidad clara. No porque la palabra “neuromórfico” suene avanzada.
Riesgos y límites
La computación neuromórfica tiene potencial, pero también limitaciones.
El ecosistema es menos maduro que el de las redes neuronales convencionales. Las herramientas de desarrollo son más especializadas. El entrenamiento de redes de impulsos puede ser más complejo. La integración con flujos industriales no está tan estandarizada. La disponibilidad de perfiles técnicos es menor.
Además, no todos los problemas necesitan procesamiento neuromórfico. En muchos casos, una CPU, una GPU, una NPU, un microcontrolador o una FPGA con procesamiento convencional será una opción más simple y mantenible.
También existe el riesgo de convertir lo neuromórfico en una etiqueta de marketing. Como ocurre con muchas tecnologías emergentes, el valor real depende del caso de uso, no de la novedad del término.
La prudencia técnica es fundamental.
Antes de usar una arquitectura neuromórfica conviene preguntarse:
¿El problema está realmente basado en eventos?
¿La dimensión temporal es crítica?
¿Hay restricciones fuertes de latencia o consumo?
¿El volumen de datos continuos es un problema?
¿La solución convencional es insuficiente?
¿Podemos validar el comportamiento?
¿Tenemos herramientas y conocimiento para mantenerlo?
Si la respuesta a estas preguntas no es clara, quizá no sea el camino adecuado.
Validación: el punto que no debe olvidarse
Una arquitectura neuromórfica o basada en FPGA no es valiosa solo por ser innovadora. Debe poder validarse.
Esto implica definir qué eventos se detectan, qué latencia es aceptable, qué tasa de falsos positivos y falsos negativos se admite, cómo se comporta el sistema ante ruido, qué ocurre con datos incompletos, cómo se diagnostican fallos y cómo se integra con el resto del sistema.
En edge AI, la validación debe incluir el entorno físico.
No basta con probar un algoritmo en un conjunto de datos. Hay que probar sensores, temporización, interfaces, alimentación, condiciones ambientales, variabilidad de señal, integración y modos de fallo.
Si la arquitectura no puede probarse, observarse y mantenerse, su sofisticación técnica no compensa el riesgo.
Conclusión
La computación neuromórfica y las FPGA representan una vía alternativa para pensar la IA en el borde.
No son una respuesta universal. No sustituyen automáticamente a GPUs, CPUs o NPU. No resuelven por sí solas los retos de la IA industrial.
Pero aportan una idea importante: cuando la IA se acerca al sensor, quizá no basta con escalar modelos y aumentar potencia. Hay que pensar en eventos, latencia, consumo, interfaces, representación temporal, integración y validación.
Las FPGA pueden ayudar a explorar estas arquitecturas porque permiten adaptar el hardware al flujo de datos y prototipar soluciones específicas.
La computación neuromórfica puede aportar enfoques eficientes cuando el problema está basado en eventos y requiere respuesta rápida.
La combinación de ambas no debe entenderse como una moda, sino como una herramienta más dentro del mapa de arquitecturas posibles para edge AI.
En ingeniería real, la pregunta no es qué tecnología suena más avanzada.
La pregunta es qué arquitectura responde mejor al problema.
Pregunta final
¿Estamos pensando la IA en el borde solo como modelos más pequeños, o deberíamos explorar también formas distintas de representar y procesar la información?